ich möchte euch hier eine neue Idee zum Antrieb von NC-Achsen vorstellen, den ich "Differenzialantrieb" getauft habe. Der Antrieb beruht auf dem Prinzip eines abgewandelten Differenzial-Flaschenzugs. Der Vorteil liegt darin, daß keine komplizierten Bauteil verwendet werden und das der Motor steht. Der Schlitten kann somit kleiner und leichter werden, was zu höheren Beschleunigungen führt.
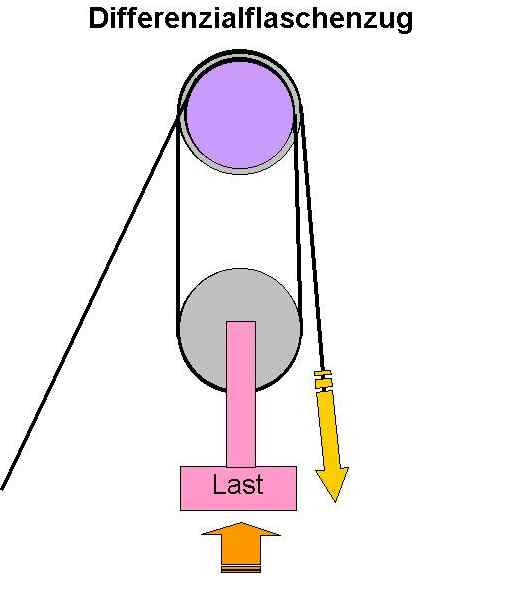
Kernstück des Differenzialfaschenzugs ist eine Welle, auf der zwei Rollen mit fast gleichem Durchmesser starr montiert sind (obere Rolle).
Man legt um die kleinere Rolle ein Seil in genau einer Schleife. Das Seil führt zu einer feststehenden Umlenkrolle und von dort zu der zweiten größeren Rolle. Das Seil legt man um die größere Rolle in der Art, daß es, wenn die kleiner Rolle es abwickelt die größere es gleichzeitig aufwickelt und umgekehrt. Dadurch wird das Seil zwischen feststehender Umlenkrolle und Rollensatz verkürzt bzw. verlängert. Diesen Effekt kann man zum Antrieb einer NC Achse ausnutzen. Zweckmäßiger Weise muß man dann eine 2. gegenüberliegende feststehende Umlenkrolle montieren und die beiden Seilenden verbinden. Da sich sowas immer sehr schwer verbal erklären läßt hier eine Skizze.
Ich habe das Prinzip in sofern abgeändert, daß ich die starre Welle durch einen zweiten Riementrieb ersetzt habe.
Damit ist es möglich den großen Riemen in einer Ebene zu führen. Auch wenn´s keiner auf den ersten Moment glaubt, das System funktioniert hervorragend. Ein Funktionsmodell hat sehr gut funktioniert.
Der Schlitten läuft sehr gleichmäßig hin und her. Die Übersetzung wird über den Durchmesserunterschied der beiden Laufräder eingestellt. Je geringer der Unterschied desto größer die Übersetzung! Um bei dem obigen Beispiel zu bleiben: Der Weg, den der Schlitten zurücklegt, istDer Faktor 1/2 kommt dadurch zustande, daß das abgewickelte Seil über die Umlenkrolle läuft. Falls der Rest des Getriebes 1/1 übersetzt, dann entspricht dies einer Gewindespindel mit 0,5mm Steigung! Das ist sehr klein. Geht man von einem Schrittmotorantrieb aus(200 Schritte pro Umdrehung) dann kann man im Vollschrittbetrieb schon 0,001mm Auflösung pro Schritt erreichen. Über die Zähnezahl kann somit jede gewünschte Übersetzung hergestellt werden. Abgesehen von der Längung des Riemens lassen sich somit sehr genaue Positionierungen realisieren.
Die Einwände, die ich bisher als Rückmeldung von Euch bekommen habe sind sicher richtig. Der Antrieb ist auch nur für einfachere Anwendungen gedacht bei welchen es nicht so sehr auf die Übertragung hoher Kräfte geht. Der Doppelseitige Riemen läßt sich natürlich auch vermeiden, in dem man die Räder auf dem Schlitten genau spiegelverkehr umschlingt.
Da die Aufwändigkeit des Antriebs kritisiert wurde stelle ich hier eine einfachere Möglichkeit mit einem Stahlseil vor. Wer nun Angst hat das Seil rutscht durch der kann auch die Scheiben 2mal umwickeln. Achtung: Bei dieser Form müssen die beiden äußeren Umlenkscheiben gekippt werden.
Die Lösung funktioniert natürlich auch mit Riemen, wenn man die Riemenscheiben so umschlingt wie oben. Ich bin gespannt was Euch dazu einfällt.
Hier noch einn interessanter Link zum Thema differenzial Antrieb: http://www.radixgmbh.de/deutsch/download/TanBo-1.pdf